Ścigacz Quadro iX5 200 by Kenobi v10
: 29 lip 2017, o 21:41
Przyszedł moment kiedy Ścigacz V8 okazał się nie wystarczający. Za duża masa, za mało mocy.
Postanowiłem pójść po bandzie i udało się odchudzić zbudować quada o 100gr lżejszego ze sporo większą mocą.
Prawdę mówiąc latam tym quadem już około 2 miesiące, a od 2 tygodni również Ścigaczem v11 o podobnym setupie lecz innej ramie którym udało mi się wykręcić 214km/h Niestety dopiero teraz znalazłem czas na ich opisanie.
Niestety dopiero teraz znalazłem czas na ich opisanie.
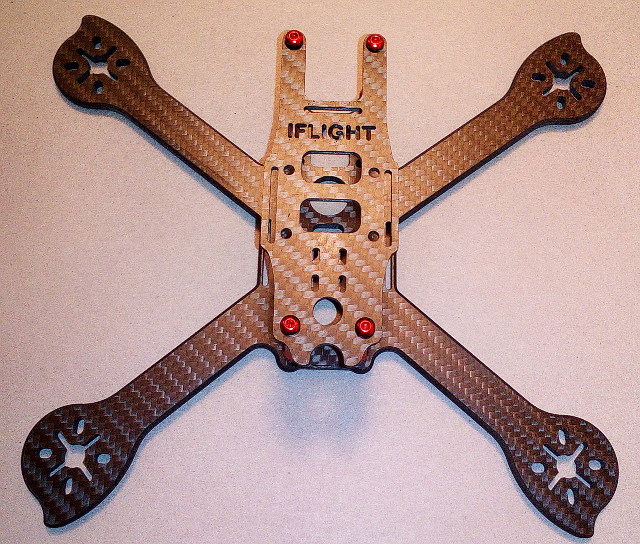
Rama to iFlight iX5
Waga ramy to ok 70g. Unibody z węgla 4mm, top z węgla 2mm. Rozstaw silników to 200mm

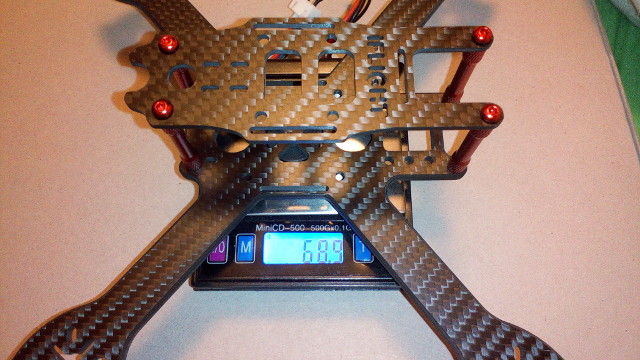
Postanowiłem ramę skrócić, oraz wyciąć zbędne fragmenty z karbonu. Śrubki aluminiowe zostały zastąpione nieco cięższymi tytanowymi które nie są tak słabe. W zasadzie aluminiowe śrubki w ramie to bardzo zły pomysł.
Udało się zejść do 61g

Postanowiłem odpuścić sobie silniki RCX. Przy około 500 lotów miesięcznie magnesy wyklejały się zbyt często, wręcz rozklejały się całe dzwonki.
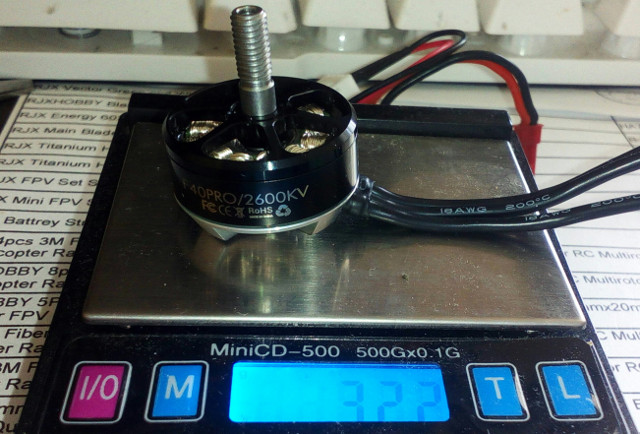
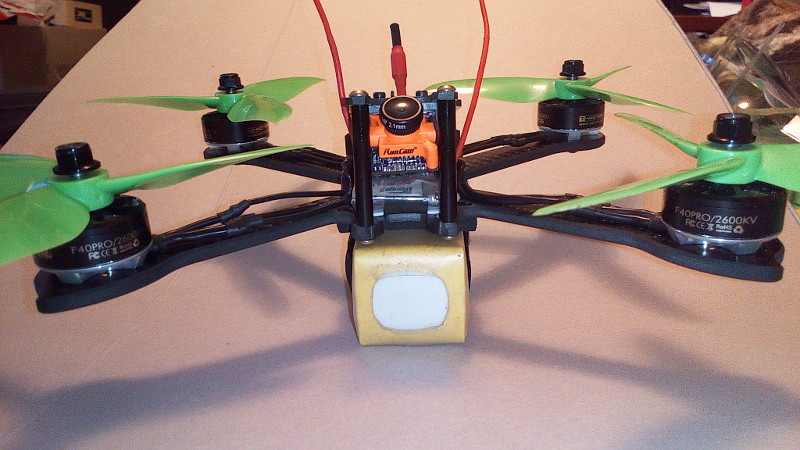
Wahałem się pomiedzy T-Motor F40 pro a Emax RS2306. Oba silniki to silniki z wielkością stojanu 2306.
Tmotor okazał się mocniejszy oraz wykazał się wyższą sprawnością. Wykonanie też sprawia lepsze wrażenie. Masa F40Pro również jest niższa.
Zdecydowałem się taż na wyższe kv czyli 2600.
Silniki wcześniej przetestowałęm w ramie V8. Przy tej mocy i masie quada czas lotu spadł do 1:30
viewtopic.php?p=124579#p124579

Regulatory. Miałem użyć Racestar 30A 4in1 ale okazał się kompletnym nie wypałem. Dwa spalone, dwa kolejne resetowały się podczas gwałtownego dodania gazu.
Za to ładnie się zapowiadało :
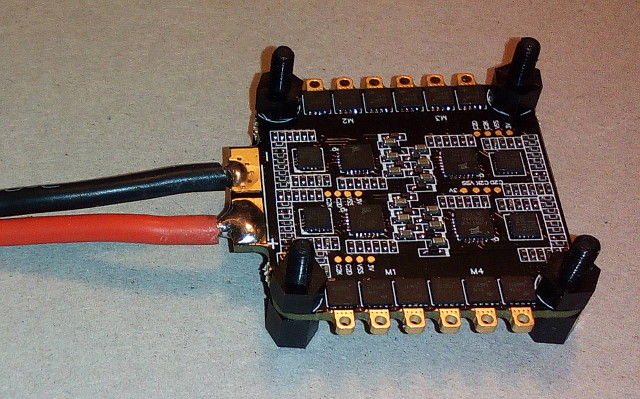
Bardzo ładnie się łaczy z Omnibusem F4
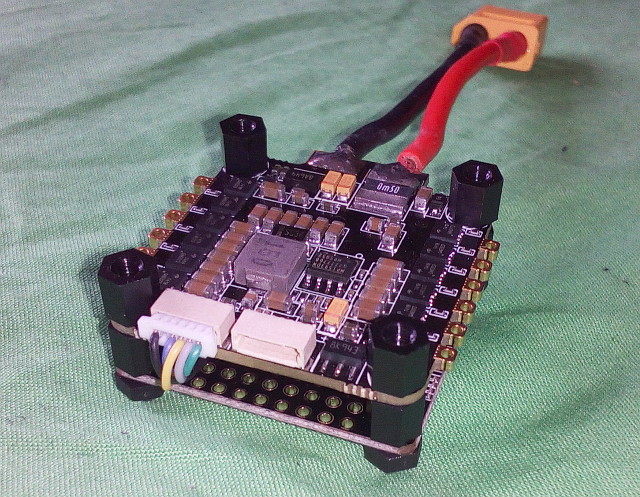
Omnibus w wersji nie Pro ma przetwornice liniową i kontroler się mocno grzeje ponieważ ma prądożerny układ MAX od OSD. Postanowiłem odlutować regulator liniowy i podprowadzić napięcie z BECa, przy okazji pomiar pradu i mapięcie pakietu.
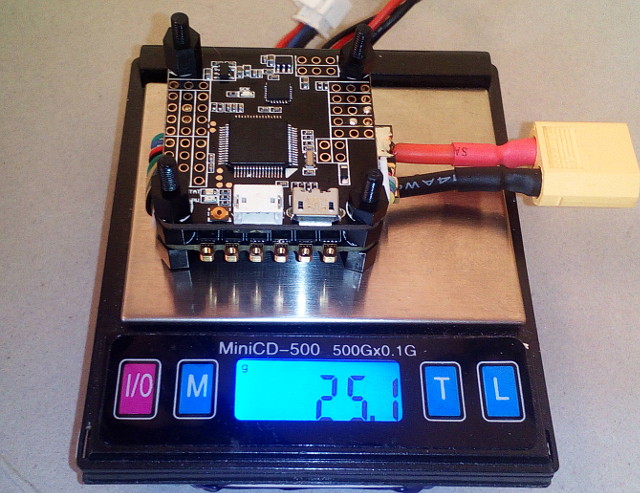
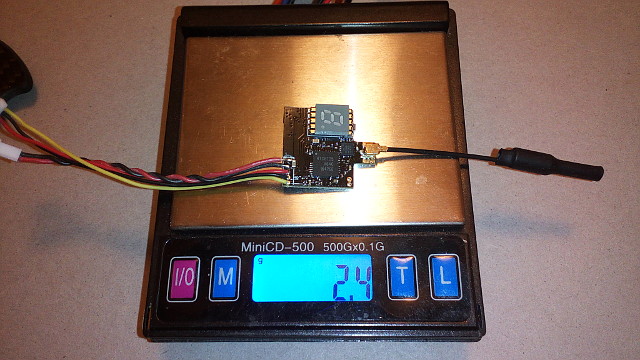
I tak mamy FC z OSD, BEC 2A, 4 regulatory 30A w jedynych 25g
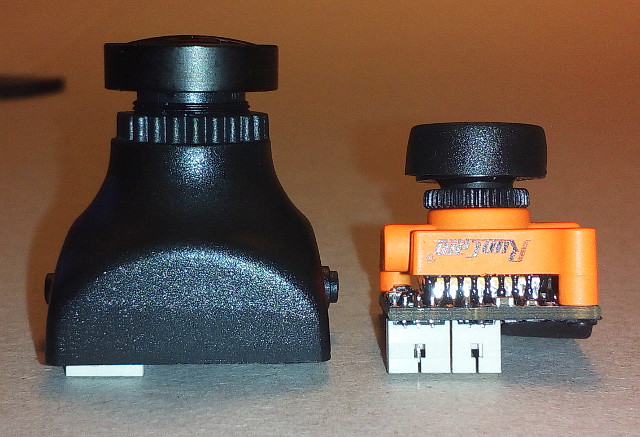
Kamerka to Runcam micro. Jet to maleństwo które działą dokładnie jak każda kamerka z SONY CCD HS1177. Jedyna wada to niekompatybilne obiektywy.
Główna zaleta to rozmiar oraz waga, o 10g niższa od normalnych HS1177. Ma też jedną bardzo ważną zaletę. Mimo że elektronika jest nie osłonięta to przetwornik CCD jedt dociskany do płytki przez mocowanie obiektywu. Największym problemem wszystkich kamer HS1177 jest przylutowany do płytki przetwornik CCD który odrywał się od przeciążeń podczas uderzenia kamerką w przeszkodę.

Nadajnik to VTX03 i też jest micro. Guzikiem regulujemy kanały, grupy oraz moc, 25, 50 i 200mW. I wbrew pozorom mimo rozmiaru jeszcze mi się żaden w dwóch użytkowanych nie spalił
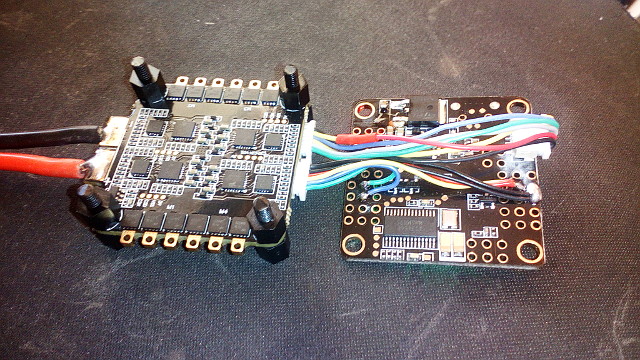
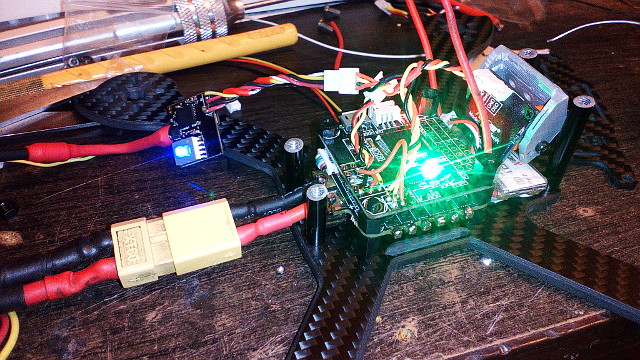
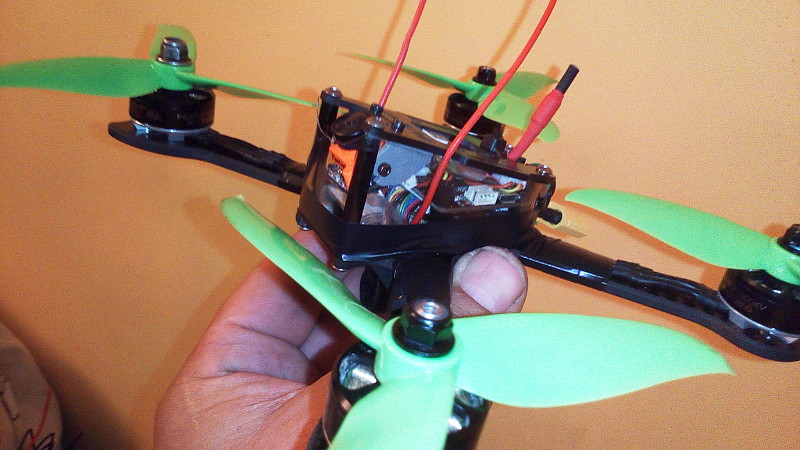
Próba elektroniki przed przylutowaniem silników i jest git.
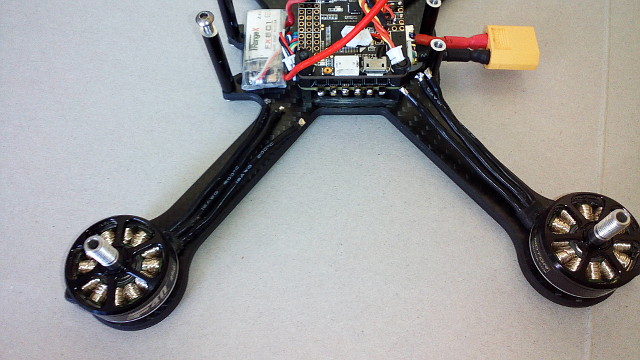
Niestety kable od F40pro okazały sięza krótkie Trzeba było je przedłużyć)
Trzeba było je przedłużyć)
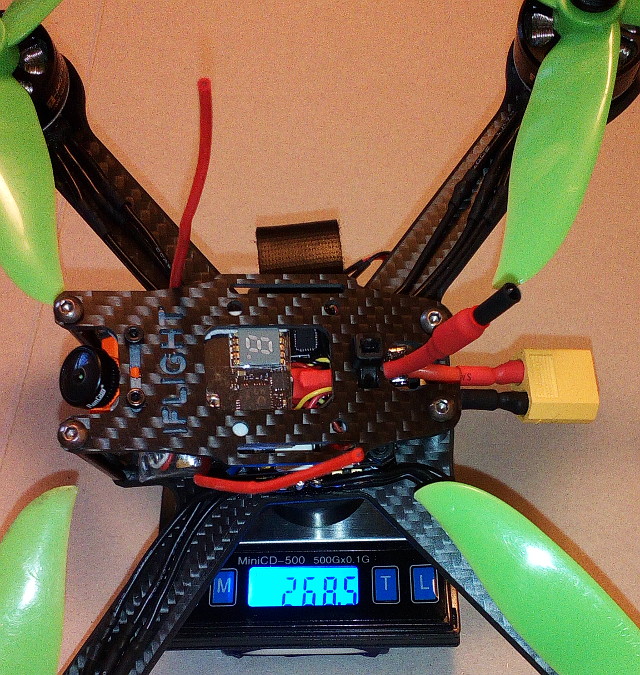
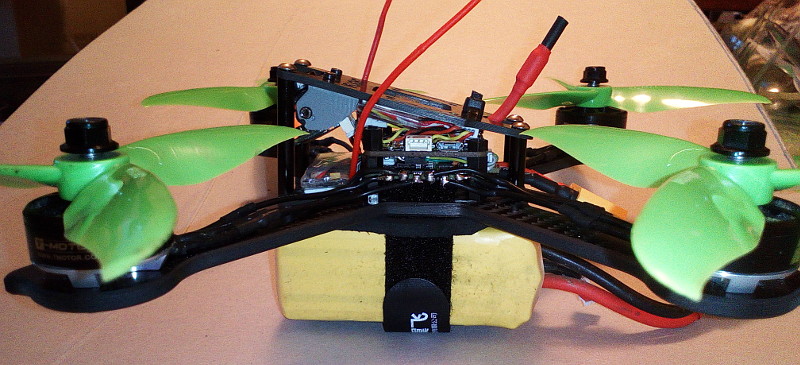
Po zmontowaniu wyszedł bardzo zwarty, i zgrabny i lekki 268g quadzik. Taki mały potworek
O pakietach 1500 i większych postanowiłem zapomnieć. I tak z pakietem Acehe 4s1300 95C mamy 440g, 130g mniej niż V8 z pakietem 1500. Pakiet Acehe jest bez szału ale że już fotki zrobione to tak zostało

Gotowy v10
Doszło jeszcze osłonki, gąbki i trochę taśmy izolacyjnej
----------------------------------------------------------------------------------------
Jak już wspomniałem regulatory 4in1 Racestar 30A się nie sprawdziły. Latałem na sprawdzonych XRotor Micro 30A
W zwiąku braku PDB i czujnika prądu który był w Recestar 4in1 zamiast Omnibusa F4 v2 zastosowałem Omnibusa F4 Pro Pro posiada wbudowany czujnik pradu oraz przetwornice 5V impulsową 3A. Ma też kilka wad, zastosowano w nim złe diody. Dlatego z prądożernymi urządzeniami czerpiącymi 5V (VTX, LEDy WS2812 ) należy się wlutować bezpośrednio na wyjściu przetwornicy.
V10 jest prawdziwym szatanem, na torze praktycznie wykorzystanie pełnego gazu jest niemożliwe Przy obniżonej masie wydłużył się czas lotu. Ostry to to ok 2min, średnio ostry to 3 minuty lotu. Ale też można spokojnie latać przez 6 minut.
Zdjęcie mam już po sporej ilości lotów, V10 sprawuje się rewelacyjnie



Postanowiłem pójść po bandzie i udało się odchudzić zbudować quada o 100gr lżejszego ze sporo większą mocą.
Prawdę mówiąc latam tym quadem już około 2 miesiące, a od 2 tygodni również Ścigaczem v11 o podobnym setupie lecz innej ramie którym udało mi się wykręcić 214km/h
Rama to iFlight iX5
Waga ramy to ok 70g. Unibody z węgla 4mm, top z węgla 2mm. Rozstaw silników to 200mm
Postanowiłem ramę skrócić, oraz wyciąć zbędne fragmenty z karbonu. Śrubki aluminiowe zostały zastąpione nieco cięższymi tytanowymi które nie są tak słabe. W zasadzie aluminiowe śrubki w ramie to bardzo zły pomysł.
Udało się zejść do 61g
Postanowiłem odpuścić sobie silniki RCX. Przy około 500 lotów miesięcznie magnesy wyklejały się zbyt często, wręcz rozklejały się całe dzwonki.
Wahałem się pomiedzy T-Motor F40 pro a Emax RS2306. Oba silniki to silniki z wielkością stojanu 2306.
Tmotor okazał się mocniejszy oraz wykazał się wyższą sprawnością. Wykonanie też sprawia lepsze wrażenie. Masa F40Pro również jest niższa.
Zdecydowałem się taż na wyższe kv czyli 2600.
Silniki wcześniej przetestowałęm w ramie V8. Przy tej mocy i masie quada czas lotu spadł do 1:30
viewtopic.php?p=124579#p124579
Regulatory. Miałem użyć Racestar 30A 4in1 ale okazał się kompletnym nie wypałem. Dwa spalone, dwa kolejne resetowały się podczas gwałtownego dodania gazu.
Za to ładnie się zapowiadało :
Bardzo ładnie się łaczy z Omnibusem F4
Omnibus w wersji nie Pro ma przetwornice liniową i kontroler się mocno grzeje ponieważ ma prądożerny układ MAX od OSD. Postanowiłem odlutować regulator liniowy i podprowadzić napięcie z BECa, przy okazji pomiar pradu i mapięcie pakietu.
I tak mamy FC z OSD, BEC 2A, 4 regulatory 30A w jedynych 25g
Kamerka to Runcam micro. Jet to maleństwo które działą dokładnie jak każda kamerka z SONY CCD HS1177. Jedyna wada to niekompatybilne obiektywy.
Główna zaleta to rozmiar oraz waga, o 10g niższa od normalnych HS1177. Ma też jedną bardzo ważną zaletę. Mimo że elektronika jest nie osłonięta to przetwornik CCD jedt dociskany do płytki przez mocowanie obiektywu. Największym problemem wszystkich kamer HS1177 jest przylutowany do płytki przetwornik CCD który odrywał się od przeciążeń podczas uderzenia kamerką w przeszkodę.
Nadajnik to VTX03 i też jest micro. Guzikiem regulujemy kanały, grupy oraz moc, 25, 50 i 200mW. I wbrew pozorom mimo rozmiaru jeszcze mi się żaden w dwóch użytkowanych nie spalił
Próba elektroniki przed przylutowaniem silników i jest git.
Niestety kable od F40pro okazały sięza krótkie
Po zmontowaniu wyszedł bardzo zwarty, i zgrabny i lekki 268g quadzik. Taki mały potworek
O pakietach 1500 i większych postanowiłem zapomnieć. I tak z pakietem Acehe 4s1300 95C mamy 440g, 130g mniej niż V8 z pakietem 1500. Pakiet Acehe jest bez szału ale że już fotki zrobione to tak zostało
Gotowy v10
Doszło jeszcze osłonki, gąbki i trochę taśmy izolacyjnej
----------------------------------------------------------------------------------------
Jak już wspomniałem regulatory 4in1 Racestar 30A się nie sprawdziły. Latałem na sprawdzonych XRotor Micro 30A
W zwiąku braku PDB i czujnika prądu który był w Recestar 4in1 zamiast Omnibusa F4 v2 zastosowałem Omnibusa F4 Pro Pro posiada wbudowany czujnik pradu oraz przetwornice 5V impulsową 3A. Ma też kilka wad, zastosowano w nim złe diody. Dlatego z prądożernymi urządzeniami czerpiącymi 5V (VTX, LEDy WS2812 ) należy się wlutować bezpośrednio na wyjściu przetwornicy.
V10 jest prawdziwym szatanem, na torze praktycznie wykorzystanie pełnego gazu jest niemożliwe
Zdjęcie mam już po sporej ilości lotów, V10 sprawuje się rewelacyjnie